



AU $29.95
| Condition: | New | Brand | Freematics |
| Model | GPS-1 |
Directions
Similar products from Electrical Tool Sets & Kits
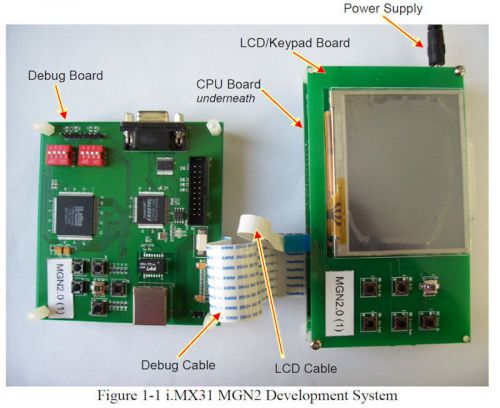
1+2 Sets Freescale i.MX31 ARM11 Development board

Klein Tools 11046 Wire Stripper-STRANDED WIRE STRIPPER
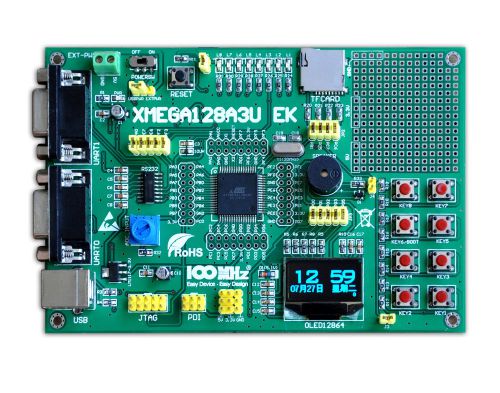
ATXmega xmega128A3U USB OLED AVR Development Evaluation Board Developer System

CEMENTEX 1000v Insulated Screwdrivers

Heavy Duty Chainsaw Sharpener,Electric,Works on all Chain Types, 3 Free Blades

IDEAL Service and Installation Kit

3M PANELSAFE LOCKOUT SYSTEM w/ 1-3/8 SPACING PANEL SAFE

Platinum Tools 100333 EZ-Grip Puck, Improve Grip / Wire Control

New PICkit3 PIC KIT3 Debugger Programmer Emulator Chip Programmer

2pcs RS232 to DB9 Nut Type Male Connector 9-Pin Adapter Signal Terminal Module

Ideal 35-083 Twist-A-Nut Conduit Deburring Tool

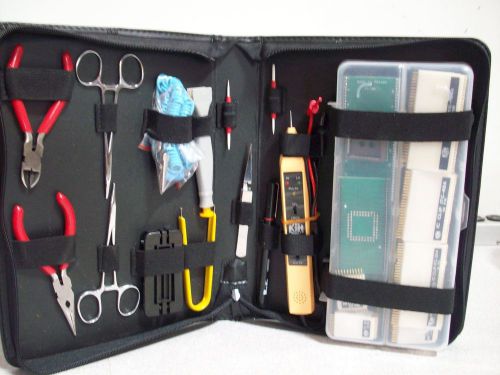
Eclipse 900-056 Field Service ESD Protection Kit
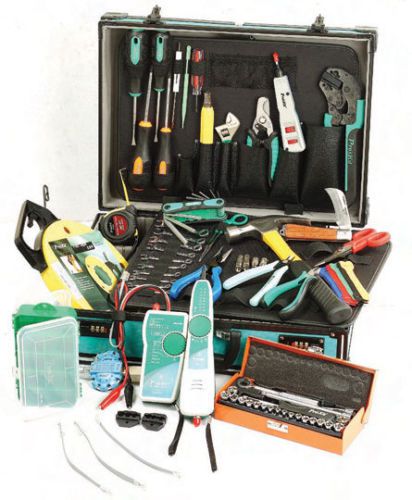
Eclipse 902-242 Deluxe Telecom Installation Kiton Kit

DB9-M2 Teeth Type Connector DB9 9Pin Female Adapter Terminal Module RS232 to Ter

Klein Tools CL100VP 3-Piece Clamp Meter Voltage Tester Electrician Tool Kit Set

Klein Tools 12-Piece Screwdrivers Pliers Stripping Tape Electrician's Tool Set

1PCS SYB-120 700 Points Solderless PCB Breadboard 60x12 Test Develop Bread Board

Klein Tools 14-Piece Pliers/Wire Stripper/Screwdrivers Electrician Tool Kit Set

Salisbury 28 Piece Insulated 1000v Electric Tool Kit
People who viewed this item also vieved

Clauss No Nik .014 Wire Stripper - Brand New - Free Shipping

VECTOR WIRE STRIPPER, CUTTER AND CRIMPER !!!

Automatic Wire Cable Stripper Cutter Cutting Stripper Stripping Crimper Pliers

K. Miller Tool Model 100 Used Yellow Handle Wire Strippers (#0041)

VINTAGE UTICA RADIO & IGNITION CUTTING PLIERS NO. 896 **NOS ** (#0030)

VINTAGE UTICA RADIO & IGNITION CUTTING PLIERS NO. 896 **NOS w/box** (#0029)

2 New Tool Bench Wire Cutter Strippers Electrical Hand Tool Crimping Brand New

Klein Tools 11062 Automatic Wire Stripper-Solid And Stranded Wire

NEW MADE IN USA Craftsman Wire Stripper / Cutters # 73574
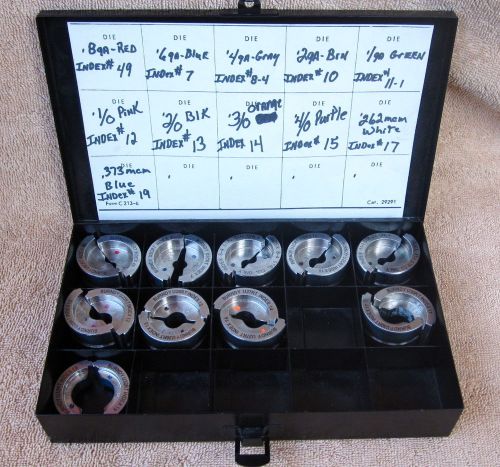
Partial Burndy Y35 Crimping Die Set w/Case No Reserve-Free Shipping to Lower 48

Burndy U5CRT Stainless Steel U Die Index 7 Blue Crimper Die Used

Burndy U39RT Compression Die, 12-ton, used

Ideal 90 Degree Wire Strippers Model T-92

C-E Combustion Engineering/Westinghouse IMPACT TOOL E-LPMS-482-001

Astro ATBX 2070 Removal Tool Slightly Used

Greenlee 1990 Dieless Crimper With Storage Box
Greenlee 727 Cable Cutter, 9-1/4"

Excelta Wire Cutter 9161 Intermediate Line, Clauss No-Nik .012, Lot of 2, 9161

Bashlin 1590C Traveling Running Ground Cable Aluminum Pulley Wire Stringing Line


B.E.S. MAG6589 Magnetic fishing wire tool

Gardner 930 1/2" EMT Conduit Bender Head

Enerpac CB200 Hydraulic Wire / Cable Bender Greenlee 800 with case

KLEIN 1/2 inch email conduit Bender
By clicking "Accept All Cookies", you agree to the storing of cookies on your device to enhance site navigation, analyze site usage, and assist in our marketing efforts.
Accept All Cookies